- 작성일 2025.08.22
- 작성자 고려대학교 세종캠퍼스
- 조회수 59
高丽大学开发出全球唯一的“全合一电磁诊疗微机器人平台”以微机器人平台为目标实现靶向癌症治疗
高丽大学世宗校区(副校长 金荣)电子与信息工学科金成勋教授研究团队,全球首次开发出基于磁粒子成像(MPI, Magnetic Particle Imaging)技术的“全合一电磁诊疗微机器人平台”。本研究在无需昂贵医疗成像设备的情况下,实现了微机器人的精确位置追踪、刺激及细胞递送,成功研发出微机器人及电磁诊疗平台,为下一代医疗机器人技术开辟了新的可能性。
研究成果已于 2025 年 7 月在线发表于制造领域全球排名第一的期刊《International Journal of Extreme Manufacturing》(IF 21.3,JCR前0.7%),论文题目为《Fabrication of MPI-traceable alginate magnetic millirobots with multimodal selective-locomotion and heating capabilities》。
本次研究团队以高丽大学电子与信息工学科金成勋(音)教授(通讯作者)为核心,由圆光大学化学融合工学科郭昭廷(音)教授(共同通讯作者)、高丽大学光电子新材料研究所 Armando Ramos-Sebastian 博士(第一作者)、高丽大学电子与信息工学科博士研究生李自成(音)(共同第一作者)、以及高丽大学电子与信息工学科博士研究生宋元日(音)、池东珉(音)共同参与完成。
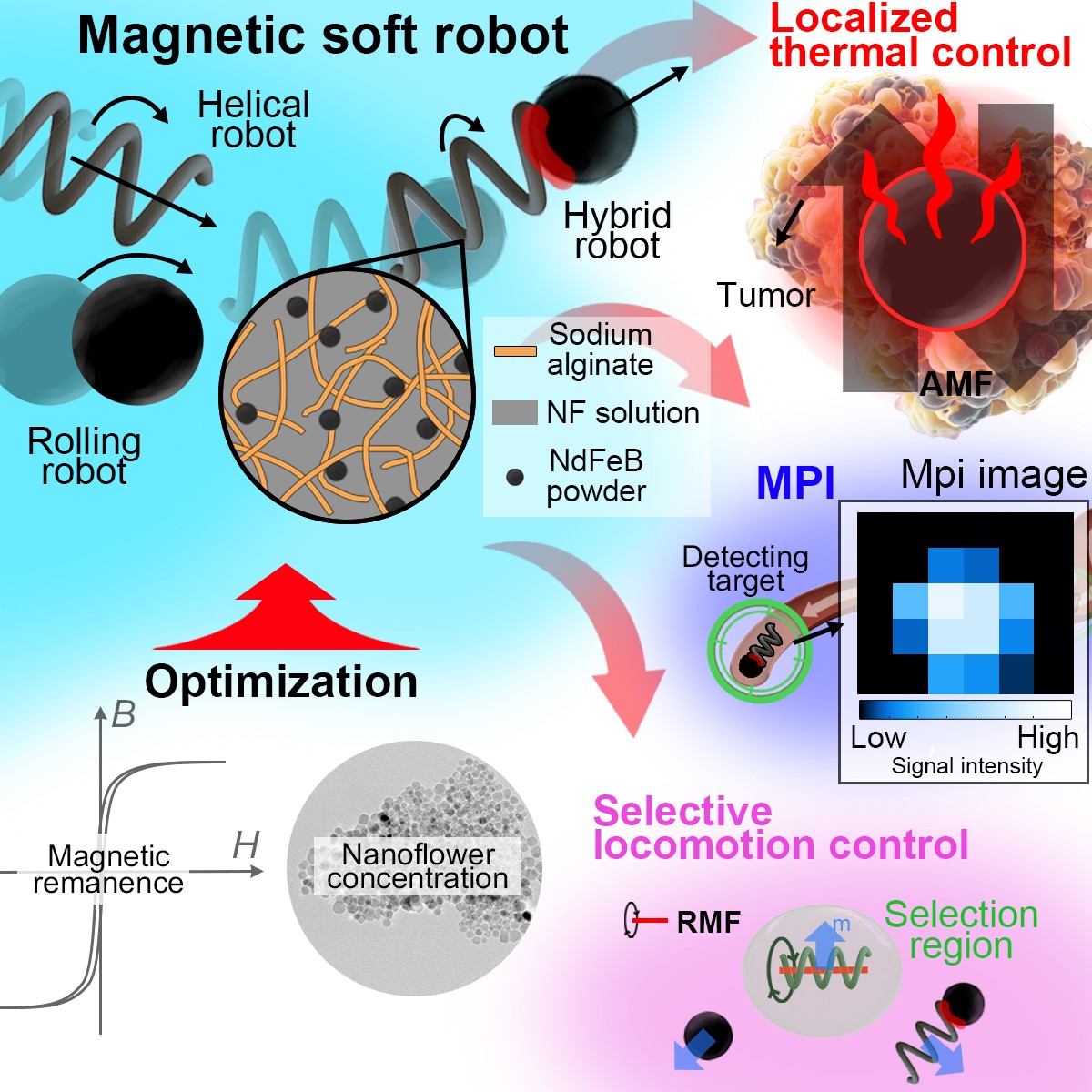
△ 电磁诊疗系统及微机器人的主要功能
以往的医疗微机器人需要借助 CT、X 光、光学相机等外部设备进行位置追踪,由此带来的辐射暴露和高成本一直被视为问题。然而,本研究团队开发的系统仅凭 MPI 信号即可实时定量追踪磁性物质的浓度与位置,从而能够革新性地提升患者的安全性与精准诊断的效率。
研究团队在高生物相容性的海藻酸盐水凝胶中复合嵌入超顺磁性纳米花(iron oxide nanoflowers)与 NdFeB(钕磁性颗粒),成功制备出具备 MPI 信号、高精度位置控制、热量控制以及细胞与药物递送等功能的多功能软性微机器人。特别是,研究团队利用多种磁性纳米颗粒,提出了实现软性微机器人多模态功能的最优制造方法。
具备 MPI 信号、高精度位置控制、热量控制以及细胞与药物递送等功能的这一微机器人,即使在模拟真实血流环境的三维流动系统中也能稳定运行,并成功精准抵达目标位置,实现了细胞的递送与生长诱导。
此外,研究团队还实现了多微机器人间的选择性控制技术,并在此基础上,实验性地实现了仅针对目标特定机器人、在选定区域内进行磁性热疗(magnetic hyperthermia)的精确热刺激技术。传统的磁性热疗方式在正常细胞中存在磁性纳米颗粒时,发热可能会同时损伤正常组织,存在一定局限性。然而,本研究开发的选择性热疗技术,即使在病灶周围存在磁性纳米颗粒的情况下,也能够在三维空间中精确控制治疗区域的位置与大小,从而仅在设定的特定区域内的磁性纳米颗粒或微机器人处诱导局部发热。通过这一方法,研究团队在实验中成功实现并验证了将正常组织损伤降至最低的选择性治疗效果。
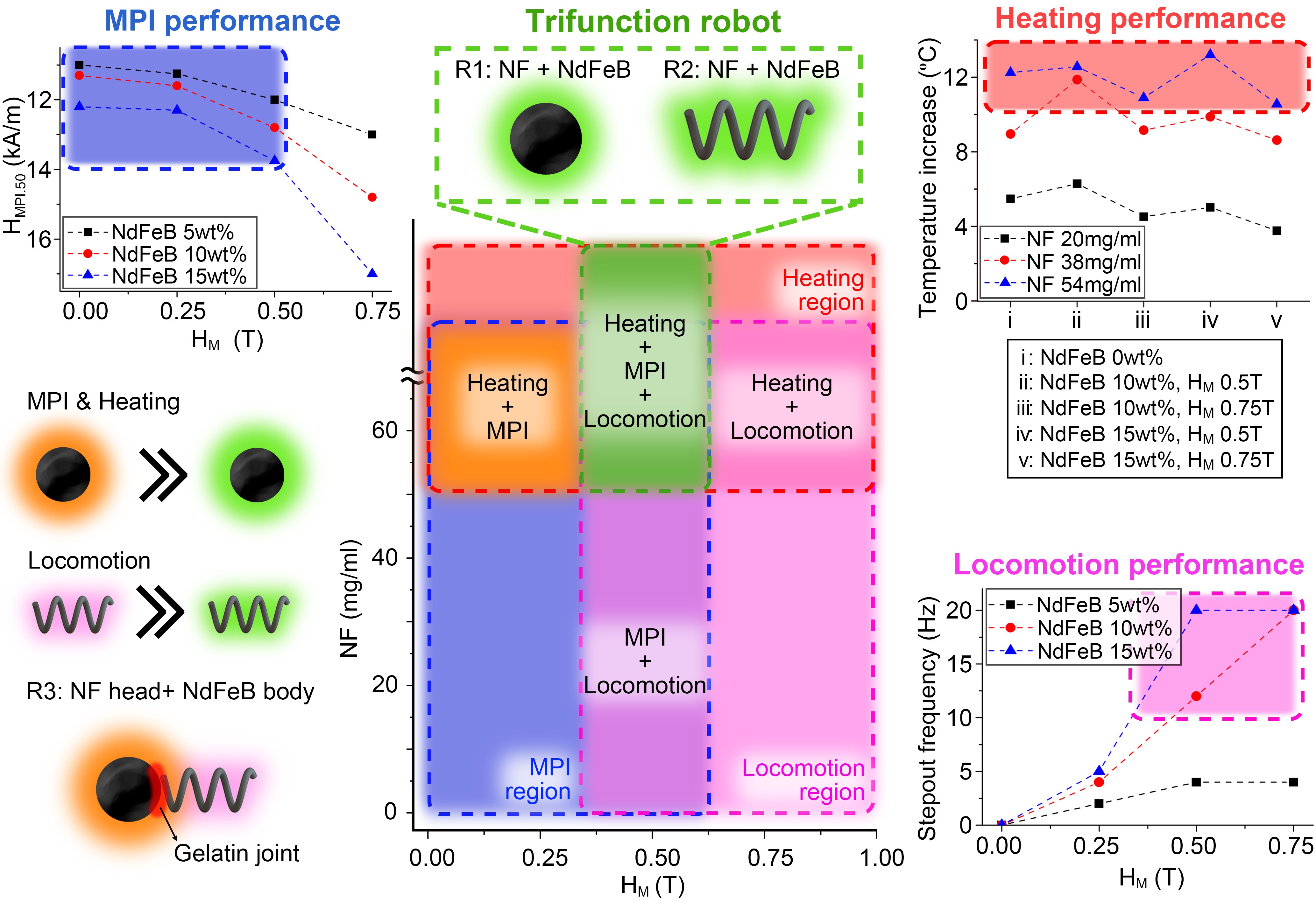
△ 软性微机器人多模态功能的最优制造条件
该系统通过单一磁场实现位置追踪、移动、治疗和细胞递送等全过程的集成控制与执行。这一创新突破了以往诊断与治疗功能分离进行的传统医疗系统的局限,首次全球性地验证了将其整合为单一平台的“全合一诊疗系统”(All-in-One Theranostics System)的可行性。
金成勋(音)教授表示:“本研究是全球首个集医疗成像、刺激、治疗与递送于一体的基于磁性的全合一诊疗平台,”并透露,“未来将正式开展长期生物体实验及动物模型的实用化研究。”
另外,本研究在高丽大学研究支持项目和科学技术信息通信部的资金支持下,由韩国研究财团资助完成。(课题编号:NRF-2022R1A2C1003381)
高丽大学世宗校区宣传集资部
翻译:赵炫怡